
Building startups, teams, farms, and big machines
I met Jason Prapas when doing my Masters at MIT, where he helped spin out research into startups. In 2019, when I was graduating, he asked me if I would join him at Fyto as the Founding Engineer. Fyto was a startup dedicated to transforming agriculture through aquatic plants (among the fastest growing plants in the world). We showed that these plants could enable on-farm protein and fertilizer production from animal manure, using much less land and water than traditional crops - all while tackling other hard problems like runoff and nitrous oxide emissions from animal manures. Unfortunately, after six years, we shut the company down.
It was a wild, six-year journey full of ups:
- Learning about my superpowers: designing robots and machines (structures, motors and bearing design, electrical integration), executing and attacking projects from start to finish, and genuinely enjoying doing the most important thing for the company no matter what it is
- Designing and building Fyto's first robotic harvester from start to finish being the only full-time engineer - mechanical, electrical, software, hydraulic, machining, assembling, testing, commissioning, etc. all included - to building a 52'-wide and then a 160'-wide machine while managing a team of 6-8 engineers
- Owning the buildout of Fyto's first commercial pilot farm. I personally owned the overall farm budget, procuring and issuing POs for $1.5M+ of materials, and I managed the overall schedule integrating permitting, EPC firm timelines, utility integration (for electrical), contractor construction, dairy operation integration, and more
- Raising a $15 million Series A and growing from 2 to 25, including speaking with the late-stage prospective investors
- Building one of the (the?) largest outdoor duckweed farms in the world, in the Central Valley (and working 12-hour days in 110+F heat along the way), and learning what it takes to build robust machines
- Teaming up with some of the best folks in the world and balancing remote farm sites and team members
...and yet it ended in failure. There's a lot I learned about why. These are some of the lessons I'll carry with me:
1. The only real way to test market fit is to sell your product to your customer. Between pre-orders and pre-purchase agreements, there should always be a way to test your market hypothesis.
2. If you bring value to your customers that they don't need or don't currently pay for, then it doesn't help your company be a comapny. At Fyto, we thought we would bring a lot of value to the farm - not just protein but local production and efficient, sustainable wastewater remediation. In the end, those weren't things that people paid for and it didn't help us or the farmers pay the bills.
3. Regulatory challenges - can be very challenging.
4. Team culture is formed and changed by each person. It needs to be fostered actively. Nothing replaces in-person interaction but sometimes you have several sites - the culture between sites needs to be actively fostered too.

Fyto's "launching point" - which we termed Fyto Kitty Hawk.

Fyto's "Bot 1" - 25'-ft wide, tethered (wired), built for ~0.1-ac or so

Fyto's Bot 4 - 160'-ft wide, EV-converted linear irrigator, built for 10-ac
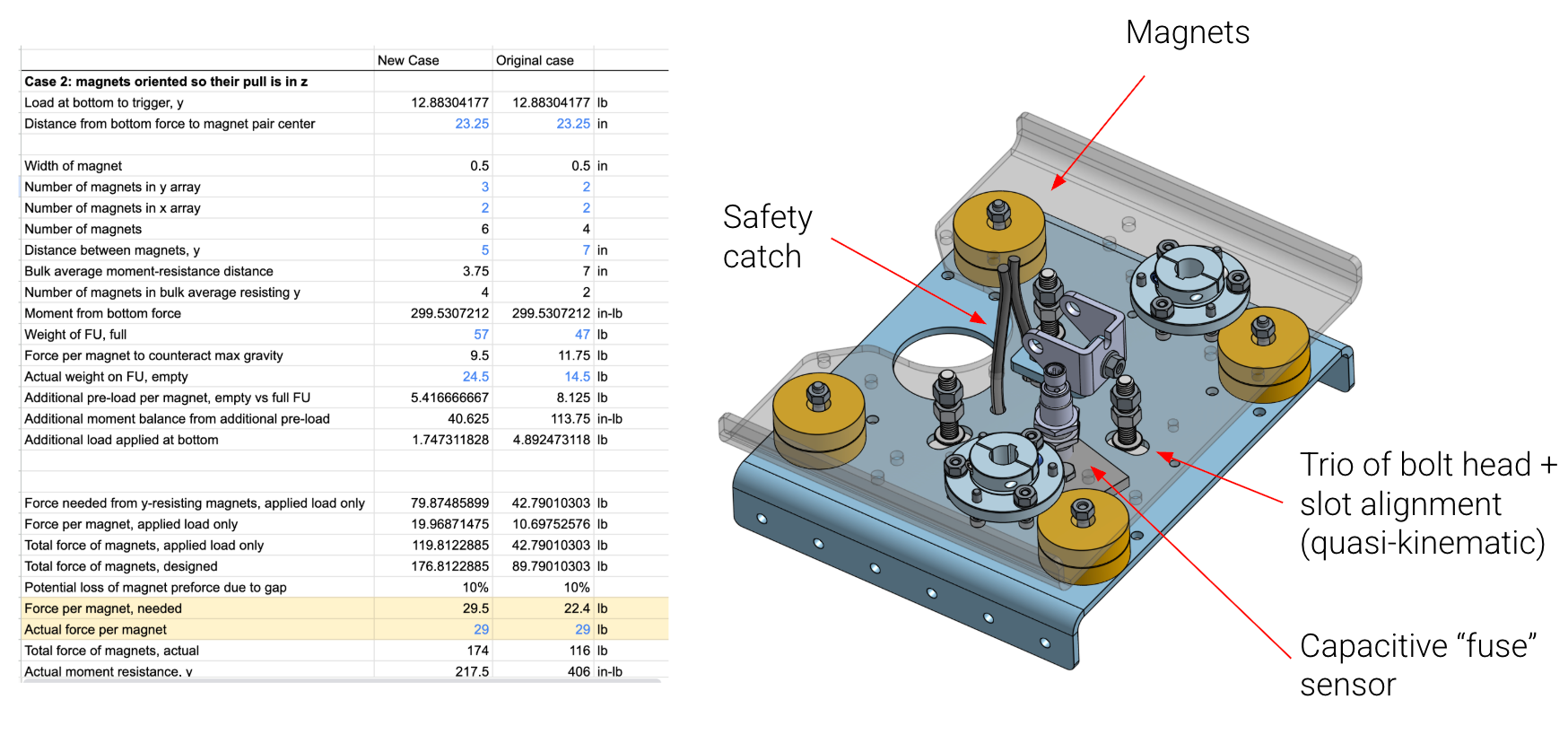
Specific design example - mechanical fuse
For almost a full season, we had issues with collisions between our robot and the myriad of obstacles in the water - walls, floating booms, pipes. In order to alleviate the pressure on all the teams to fully prevent collisions, I designed a mechanical fuse with:
- Tunable trigger force based off magnet strength and distance between magnets
- In-field tunability provided by bolt Z-axis tuning + magnet pre-load shims
- Capacitive sensor provides software feedback on fuse trigger state
- Ultimately became a “must-have” on all of our harvester designs to protect the end-effector from collisions
- In-field tunability provided by bolt Z-axis tuning + magnet pre-load shims
- Capacitive sensor provides software feedback on fuse trigger state
- Ultimately became a “must-have” on all of our harvester designs to protect the end-effector from collisions

One of the early design iterations of the fuse. Trigger forces were tuned to avoid yielding any upstream structures, and could be separately tuned in the X- and Y-axes.
The idea came from my colleague Elliott Donlon, who had worked with a similar magnetic end-effector previously. I sketched out the initial physics, ran experiments with a simplistic metal tube + magnet setup with a force sensor, and integrated it into our design. We used strong N52 magnets with shims to create gaps as needed (to tune the magnet force), and used rounded bolt-heads with laser cut slots as a "kinematic coupling", providing the end-effector with low-cost precision. A screenshot of the design and design spreadsheet is shown below.
Ultimately, the design was a success and we couldn't imagine future iterations without such a safety feature.
Other specific Engineering skills I gained:
- Designing and building reliable powertrain components (motors/actuators, couplings, bearings, drive components): our robots lived outside in the sun, rain, and dust, and had to operate everyday during the peak 6-9 month season. This meant carefully designing motor mounts, gearboxes, shaft couplings, bearings, and related hardware that could last millions of cycles. Specifically, I designed systems using 300-3500W 48VDC motors, with gearboxes ranging from 3:1 to 300:1 ratios, using direct drive and chain drive components.
- Architecting, commissioning, and debugging electrical components (industrial control panels, motor and sensor commissioning/communications): in the first FytoBot, I worked with our electrical consultant (later full-time on the team) and as the only full-time engineer, I was the main hands-on person commissioning and running the robot. This meant working with motor controllers, electronics, sensors, SCADA systems, and more using a variety of communication protocols - Modbus-TCP, CANopen, Ethernet, CAN J1939, as well as setting up remote monitoring systems using OPC-UA, setting up a VPN, and more. I did loop checks, FAT/SAT protocols, debugging (especially for motors), and knew my way around every electrical system we designed. I could help talk to contractors, panel shops, and wire harness folks, and designed the electronics cable carrier in every robot.
- Building the first computer vision setup on the FytoBot: I built the first prototypes for attaching a camera to the robot, taking pictures during a harvest (or during photo runs), and writing an algorithm for estimating the density from the pictures. This involved many photo-taking experiments correlating pictures (analyzed with Python and opencv packages) with hand-taken density measurements. A camera was triggered and saved to a Raspberry Pi using the GPIO pins, and the density algorithms would be computed.
- Designing hydraulic systems (piping networks, pumps, valves, sensors, dispensing systems) with water, manure water, and sulfuric acid: I designed several of the hydraulic systems on board the robot and across our automated farm. Since Fyto's core innovation was autonomously harvesting aquatic plants, I ran harvesting experiments using centrifugal, diaphragm, double-diaphragm, vacuum, flexible impeller, vortex centrifugal pumps, and more. Across the farm, I helped design several systems, including for sulfuric acid dosing (safety and precision being paramount), water and manure-water delivery throughout the ponds (balancing flow rate with even distribution), and drainage. I am very comfortable designing all manner of hydraulic systems and working with flow meters, pressure sensors, actuated valves (and which types work best for what), pumps, and their related control systems.

Pounding poles for your startup represents half the fun! Not pictured: unloading our machines with telehandlers and forklifts, using tractors and skid-steers, mixing feed rations for cows, and others!

Designing for the outdoors - not easy. Skip the RJ-45.